|
I am a second-year Ph.D. candidate at Boston University. I am a member of Dependable Computing Laboratory, where I work with Prof. Wenchao Li. I received my degreed of M.S. in Mechanical Engineering from Carnegie Mellon University, M.S. in Computer Graphics, Vision and Imaging (CGVI) with dictinction from University College London (UCL), and my Bachelor's degree in Engineering from Nankai University. My research topics focuses on reinforcement learning as well as decision-making and controls in robitics, with the goal of deploying the learning-based algorithms to real-world safety-critical applications. |

|
Publications
|
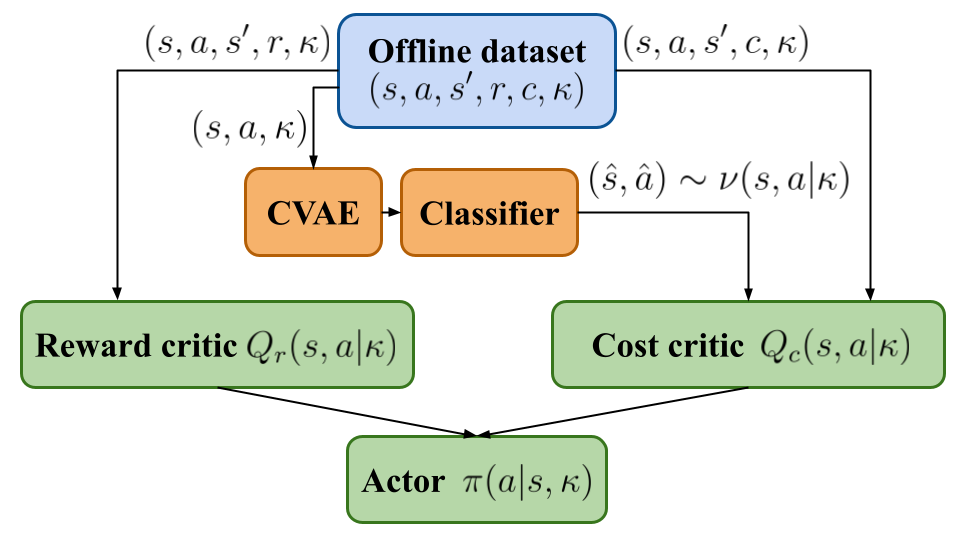
Constraint-Conditioned Actor-Critic for Offline Safe Reinforcement Learning Zijian Guo, Weichao Zhou, Shengao Wang, Wenchao LiICLR 2025 [paper] |
|
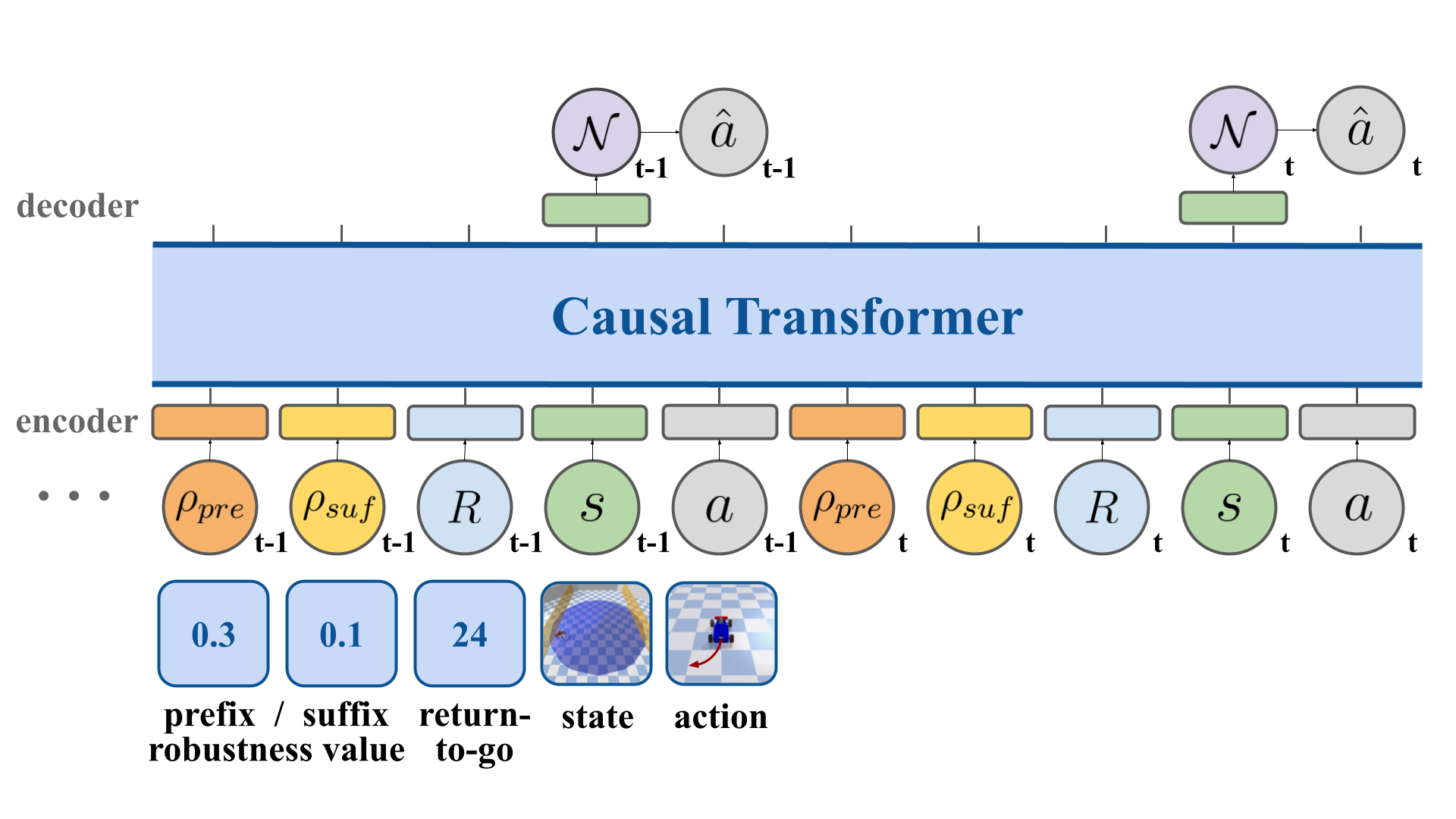
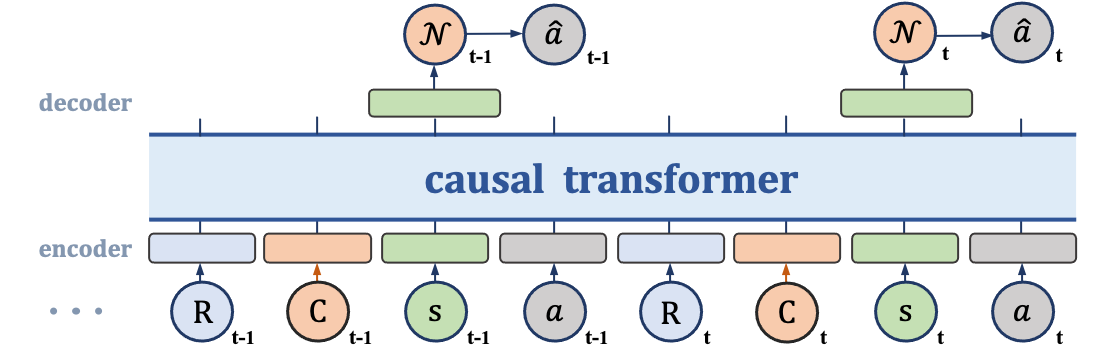
Temporal Logic Specification-Conditioned Decision Transformer for Offline Safe Reinforcement Learning Zijian Guo, Weichao Zhou, Wenchao LiICML 2024 [paper] |
|
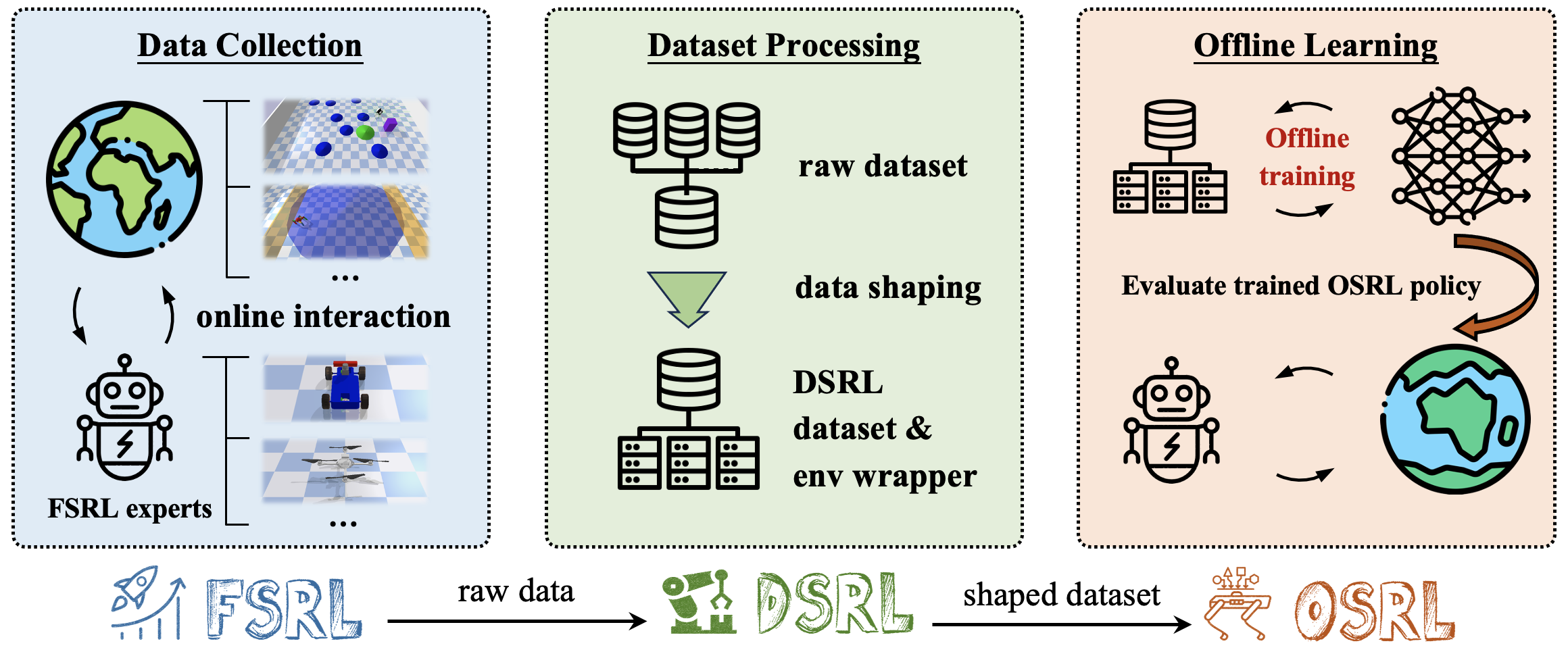
Datasets and benchmarks for offline safe reinforcement learning Zuxin Liu*, Zijian Guo*, Haohong Lin, Yihang Yao, Jiacheng Zhu, Zhepeng Cen, Hanjiang Hu, Wenhao Yu, Tingnan Zhang, Jie Tan, Ding ZhaoDMLR 2024 [paper] [website] |
|
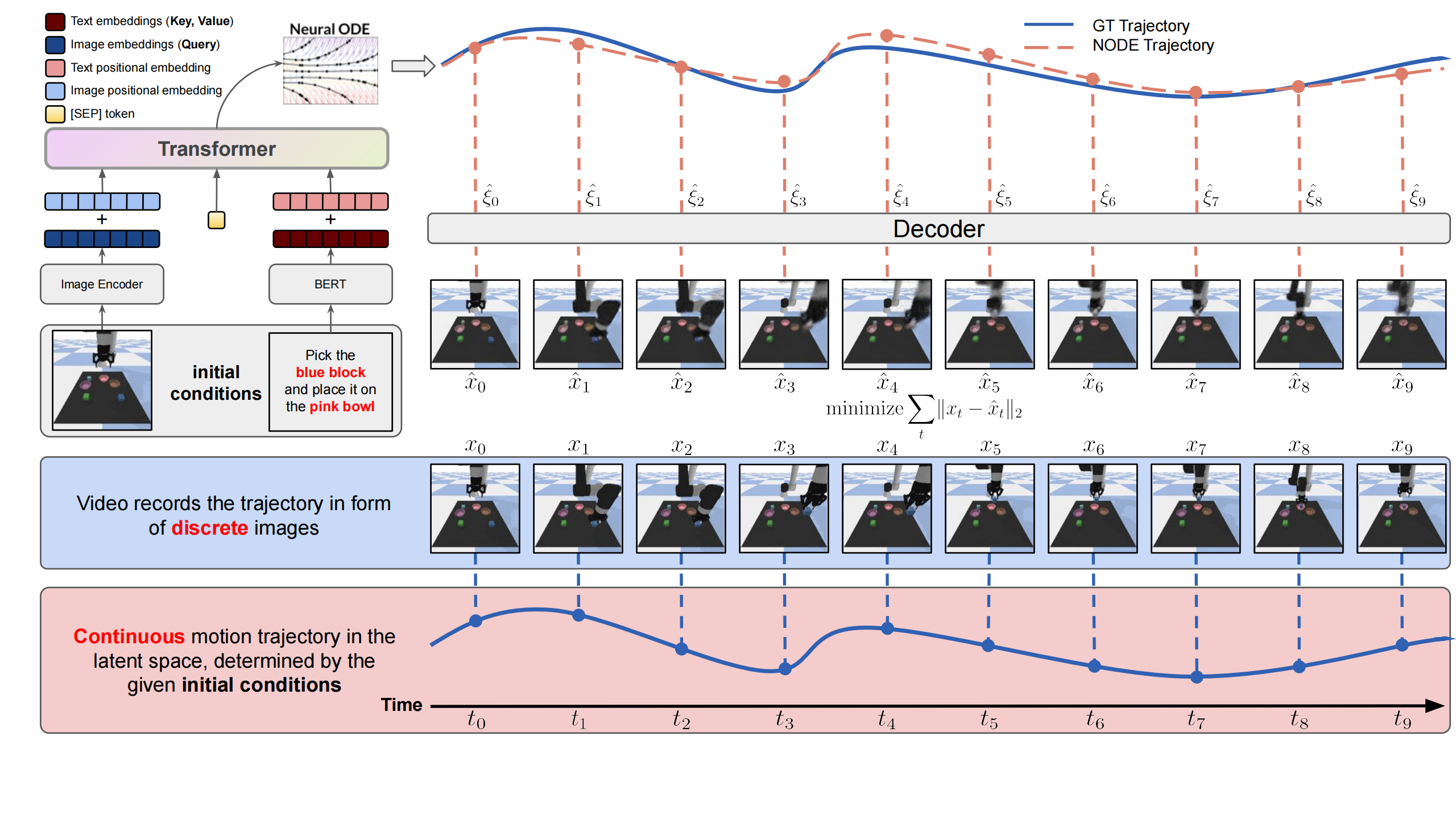
TiV-ODE: A Neural ODE-based Approach for Controllable Video Generation From Text-Image Pairs Yucheng Xu, Nanbo Li, Arushi Goel, Zonghai Yao, Zijian Guo, Hamidreza Kasaei, Mohammadreza Kasaei, Zhibin LiICRA 2024 [paper] |
|
Constrained decision transformer for offline safe reinforcement learning Zuxin Liu*, Zijian Guo*, Yihang Yao, Zhepeng Cen, Wenhao Yu, Tingnan Zhang, Ding ZhaoICML 2023 [paper] |
|
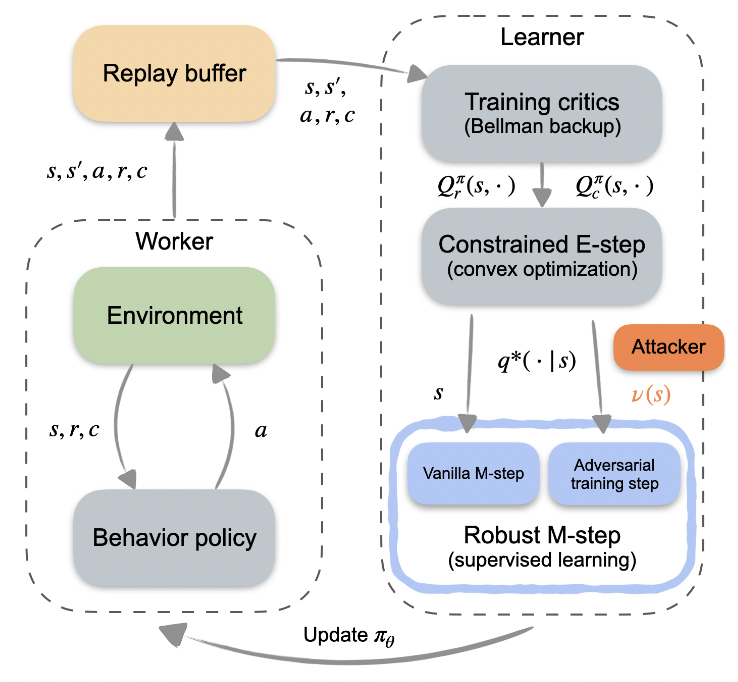
Towards Robust and Safe Reinforcement Learning from Benign Off-policy Data Zuxin Liu*, Zijian Guo*, Zhepeng Cen, Huan Zhang, Yihang Yao, Ding ZhaoICML 2023 [paper] [website] |
|
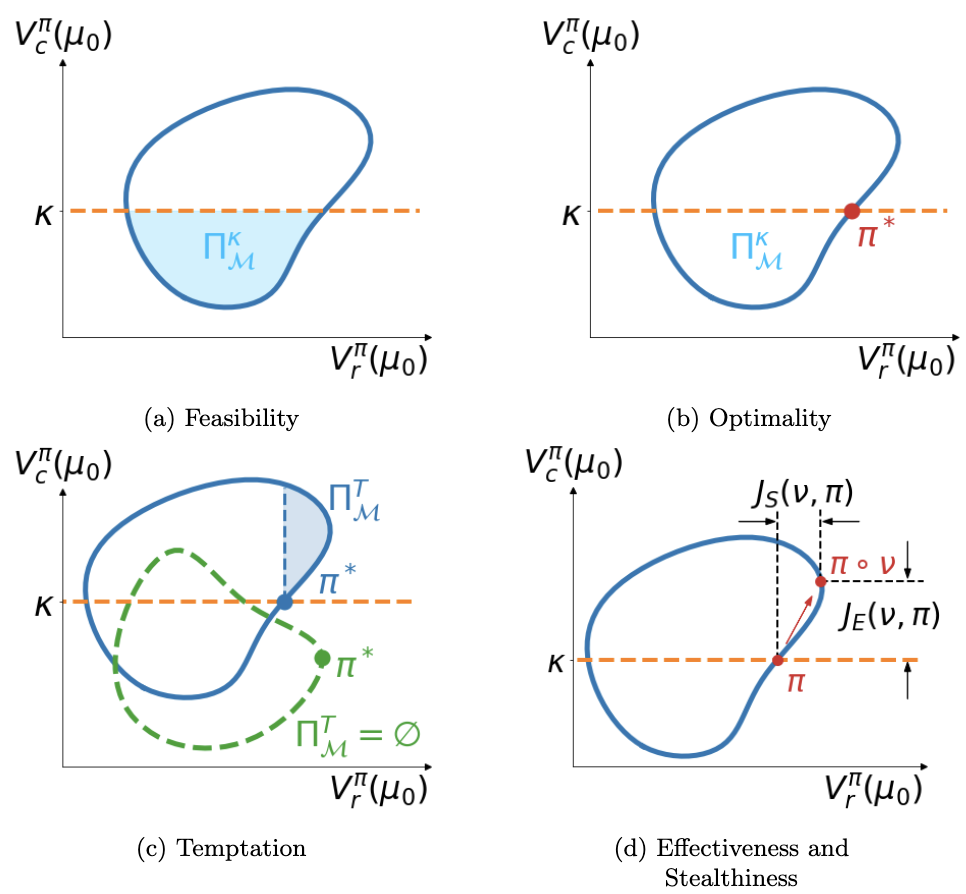
On the Robustness of Safe Reinforcement Learning under Observational Perturbations Zuxin Liu, Zijian Guo, Zhepeng Cen, Huan Zhang, Jie Tan, Bo Li, Ding ZhaoICLR 2023 ICML 2022 Safe Learning for Autonomous Driving Workshop, Best Paper Award (Runner-up) [paper] [website] |

|
Constrained Model-based Reinforcement Learning via Robust Planning Zuxin Liu, Zijian Guo, Ding ZhaoICML 2022 Safe Learning for Autonomous Driving Workshop, Spotlight talks [paper] [video] |
Projects

|
Autonomous Ground Delivery Robot: Localization, Perception and Planning, 2022 We developled a full-stack autonomous navigation pipeline including sensor calibration, mapping, localization, perception, planning, and control based on ROS. Aditionally, I built a simulation environment for the roobt in Webots simulator, trained it using reinforcement learning algorithms and tested them in the real world. Our robot is featured on CMU's website. More details can be found in our documents. |

|
Aiding Monocular SLAM with Prior Constraints, 2021 This is my master dissertation at UCL. I proposed an approach to exploiting semantic and public prior information in a monocular SLAM system that utilises ORB features and line features. These two types of information are preprocessed in a series of DBSCAN, MultiRANSAC, and point-to-point ICP to achieve better data association. Experiment in KITTI datasets demonstrates that the method can reduce scale drift and therefore improve localization and mapping accuracy. |
|
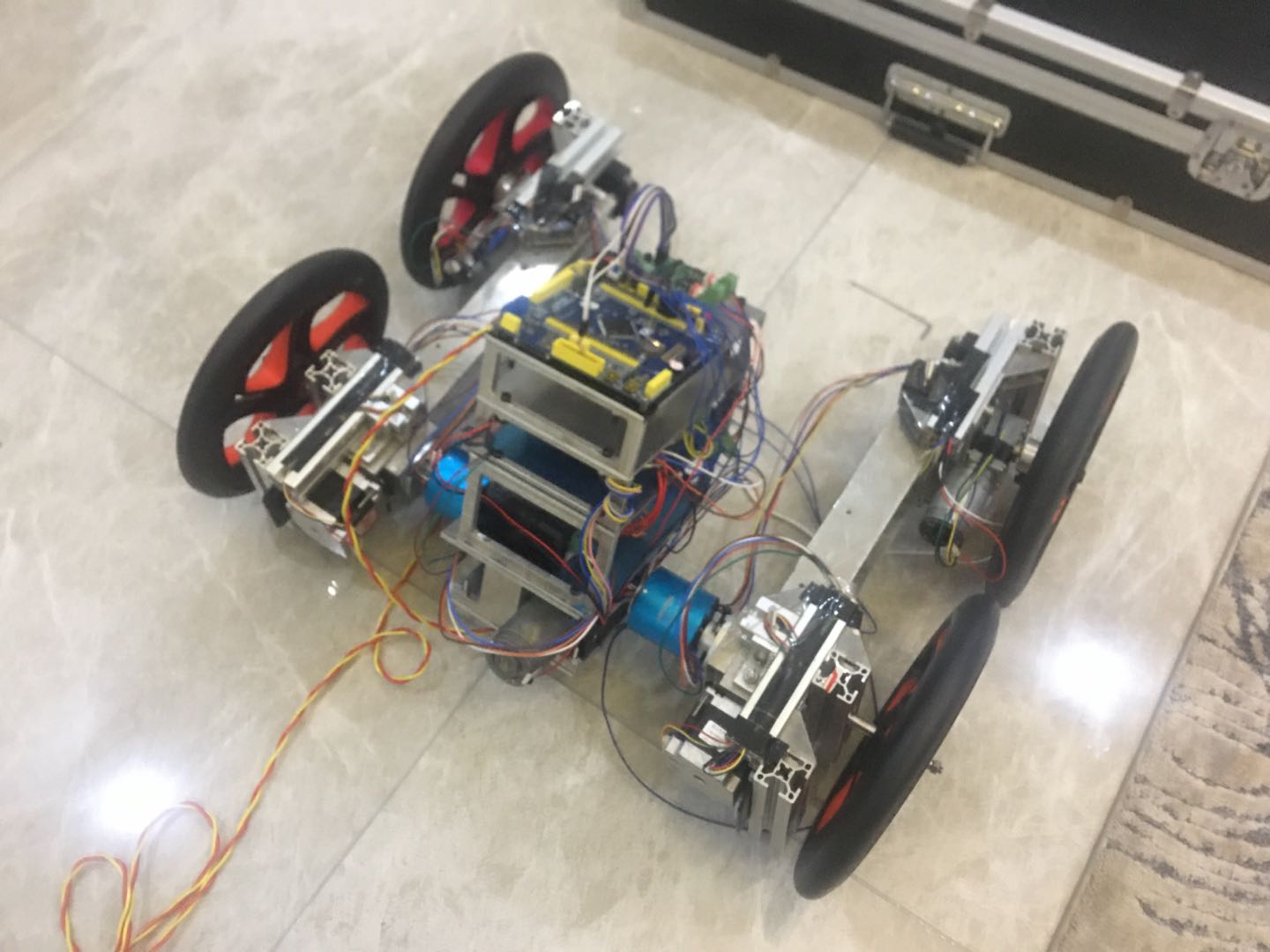
All-terrain Anti-interference Robot Based on the Optical Fiber Communication, 2020 We designed and built an all-terrain anti-interference robot aiming for disaster rescue from scratch. We designed the 3D model of the robot in SolidWorks and performed the kinematic and dynamics simulation in Adams and Matlab. Particularly, we developed a unique rolling wheeled robot chassis, which was patented, to surmount barriers. The robot achieved mapping, localization and navigation functions using ROS packages, and remote communication via optical fiber. This project won the first price of the National Training Program of Innovation and Entrepreneurship for Undergraduates (top 3%) |

|
Intelligent Household Service Robots Development, 2019 We developed several intelligent household service robots that can interact with humans and achieve multiple tasks based on ROS. The robot can locate sound source, recognize speech commands, perform computer vision tasks such as object classification and pose detection, and navigate through dynamic indoor environment without collision. We competed in World Robot Summit challenges and RoboCup@Home competition and won 9 awards in total. More details and video demos can be found in our website. |